


联系我们

当前位置:
邢台 新普机械制造厂 >
石家庄本地产品动态
缠绕膜打包机混凝土输送泵厂家优质货源
更新时间:2025-01-20 17:16:15 浏览次数:11 公司名称:邢台 新普机械制造厂
以下是:缠绕膜打包机混凝土输送泵厂家优质货源的产品参数
| 产品参数 | |
|---|---|
| 产品价格 | 13000/台 |
| 发货期限 | 1 |
| 供货总量 | 55 |
| 运费说明 | 包邮 |
| 最小起订 | 1 |
| 质量等级 | 1 |
| 是否厂家 | 是 |
| 产品品牌 | 新普 |
| 发货城市 | 邢台 |
| 产品产地 | 河北 |
| 加工定制 | 是 |
| 可售卖地 | 全国 |
| 产品重量 | 290kg |
| 质保时间 | 1年 |
| 外形尺寸 | 870x880x1100mm |
| 适用领域 | 使用于轮胎、钢丝、钢带、钢卷、胶管自动缠绕、线管 |
| 产品功率 | 2600w |
| 产品别名 | 环形轮胎缠绕膜包装机 |
以下是:缠绕膜打包机混凝土输送泵厂家优质货源的图文视频




缠绕膜打包机混凝土输送泵厂家优质货源,新普机械制造厂为您提供缠绕膜打包机混凝土输送泵厂家优质货源产品案例,联系人:魏经理,电话:18330990691、18330990691,QQ:2606552328,发货地:邢台任泽区邢家湾镇工业区发货到河北省 石家庄市 长安区、桥东区、桥西区、井陉矿区、裕华区、井陉县、正定县、栾城县、行唐县、灵寿县、高邑县、深泽县、赞皇县、无极县、平山县、元氏县、赵县、辛集市、藁城区、晋州市、新乐市、鹿泉区。 河北省,石家庄市 石家庄市,简称“石”,河北省辖地级市、省会、特大城市,是国务院批复确定的中国京津冀地区重要的中心城市之一。截至2022年末,全市下辖8个区、11个县,代管3个县级市,总面积14530平方千米,常住人口1122.35万人,城镇人口801.79万人,城镇化率71.44%。
缠绕膜打包机混凝土输送泵厂家优质货源产品的真实面貌,远比文字描述来得丰富和生动。点击观看我们的视频,让产品自己为您讲述它的故事。
以下是:缠绕膜打包机混凝土输送泵厂家优质货源的图文介绍
新普机械制造厂拥有自己的 河北石家庄二次结构浇筑机设计团队、专业的技术调试团队、24小时的售后服务团队以及精湛技术的工厂。 公司始终坚持以“严谨”为宗旨,以为客户提供智能的性能与可靠性的 河北石家庄二次结构浇筑机,增强企业竞争优势;满足客户目前及未来的需求为目标;以技术先进、可靠、快速等解决方案,让客户满意是我们永远不懈的追求。


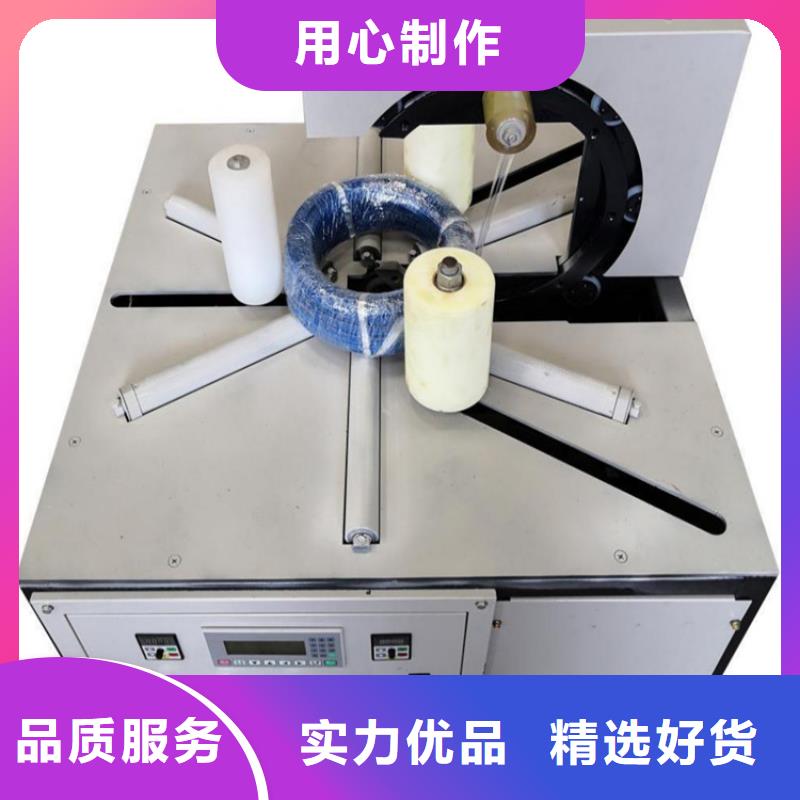
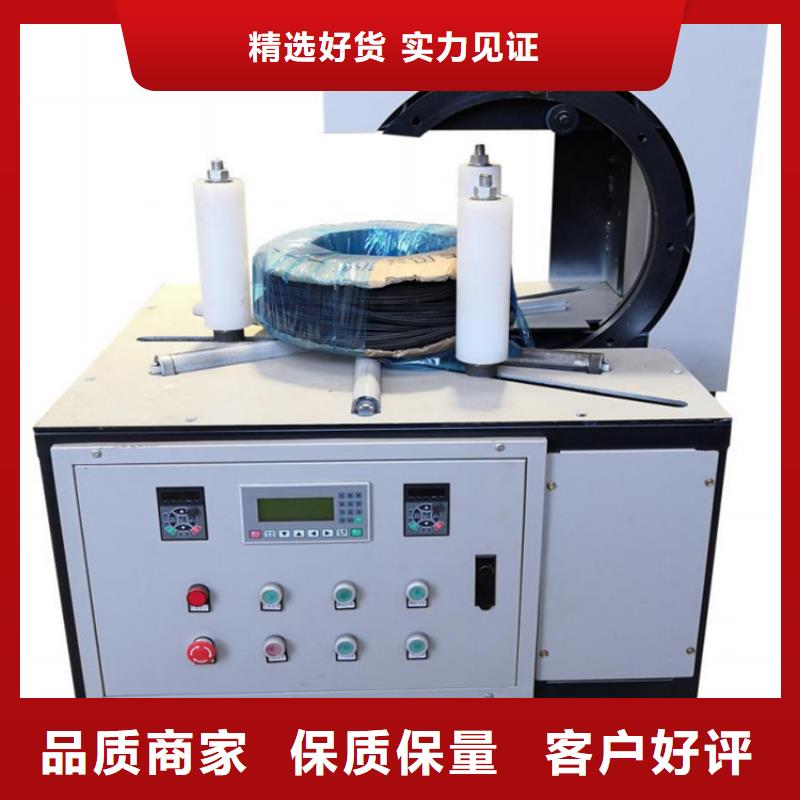
品名:全自动缠绕机(电磁阻拉伸型) 薄膜缠绕机以拉伸缠绕膜为主要包装材料,对体积大重量大整机或艺术产品进行包膜,因为货物不会发生散包和倒塌现象,对货物能起到缠绕包装作用,广泛使用于轮胎、钢丝、钢带、钢卷、胶管自动缠绕、线管,环形物体防止货物在搬运过程的损坏,并起到防尘、防潮及保洁作用缠绕膜包装后的产品便于仓储和搬运。 缠绕膜打包机主要特点: 1、控制系统:PLC 2、光电开关可自动检测物体进行缠绕包装 3、转盘轻缓启动和停止,速度可调 4、膜架升降速度可调 5、自动或手动模式可选 6、机器尺寸可根据客户要求定做 机器参数 卧式缠绕包装机的产品用途 卧式缠绕机是基于线体而设计的一种线体缠绕包装方式,卧式缠绕包装机主要用途有,线管,钢卷,轮胎,环形物体等。



新普新普自动化设备有限公司简介 新普新普自动化设备有限公司位于泉城新普,专注于后段自动化包装设备的设计、研发、生产、销售及相关设备升级技术服务。新普自动化从事包装设备行业10余载,公司拥有**的生产设备、雄厚的技术力量。?客户遍及全国各地,产品出口欧洲、美洲、澳洲及东南亚等和地区。公司在提供**产品质量的同时,还提供完善的售后服务体系。公司主要产品:缠绕包装机、翻转机、打包机、自动化开箱封箱设备、封切热收缩设备、码垛机、打包工具、包装材料及各种包装流水线等,我们将不遗余力地把所掌握的包装技术和对自动化系统的研究相结合,不断设计出自动化包装系统的经典之作。“把人从繁重的包装生产线上解放出来,让机器代替手工作业,使企业降低成本,提高生产效率”——这是新普自动化为之努力的较终使命与奋斗目标。。 欢迎来到新普新普自动化设备有限公司网站, 主要经营内蒙缠绕包装机,玻璃陶瓷缠绕包装机,钢丝缠绕包装机,力车轮胎缠绕包装机,钢圈包装机!电线薄膜包装机,焊丝缠绕包装机,型材包装机,焊丝热收缩包装机,高速开箱机,铜带缠绕包装机,摩托车轮胎缠绕包装机,平板纸缠绕包装机,帘子布缠绕包装机,锦纶切片缠绕包装机,无纺布缠绕包装机,威海打包机,耐火砖缠绕包装机。



本实用新型涉及一种将膜卷绕于卷包的缠绕机,更详细来说,涉及一种在拾取放置于农场的卷包时能够容易地掌握其位置等的缠绕机。 背景技术: 通常,在生成卷包的情况下,由收割的作物成形圆柱状卷包。而且,使用另外设置的缠绕机从农场拾取该生成的卷包,在该外周卷绕膜并再次放出到农场。 此时,在对卷包卷绕膜的缠绕机中,进行如下的作业。 首先,在拾取放置于农场的卷包时,使被拖拉机牵引的缠绕机后退,使卷包位于正后方的拾取位置。而且,使缠绕机的转台向后方倾斜,使用安装于卷包支承台的臂、转台的辊夹持卷包,将卷包抬起并转移到转台。然后,使用转台使卷包以水平轴和铅垂轴为中心旋转,并将膜卷绕于外周。 但是,在这样拾取卷包并卷绕膜的情况下,存在如下问题。 即,在缠绕机被拖拉机牵引的情况下,必须一边确认后方的卷包的位置一边使拖拉机后退,但由于在拖拉机的后方立起设置有缠绕机的臂,因此,不容易确认卷包的位置。另外,如果卷包接近,则卷包会位于转台的死角,因此,驾驶员必须窥视后方的卷包,会引起腰部、背部肌肉的疼痛。 技术实现要素: 于是,本实用新型为了解决上述课题,其目的在于提供一种缠绕机,驾驶员即使不直接目视卷包,也能够确认其位置等。 即,本实用新型为了解决上述课题,提供一种缠绕机,具备:转台,载置卷包;倾斜移动机构,使该转台倾斜移动;及臂,将卷包拾取到通过该倾斜移动机构而进行倾斜移动的转台,缠绕机设有朝向拾取所述卷包的方向的相机。 根据这种结构,由于能够利用相机确认农场的卷包的位置,因此,即使驾驶员不直接目视卷包的位置,也能够通过设于驾驶席的前方的显示器确认卷包的位置并拾取卷包。 另外,在这样的实用新型中,将所述相机设于转台与驾驶席之间。 根据这种结构,除能够利用相机确认拾取卷包时的卷包的位置外,还能够确认将膜卷绕在载置于转台的卷包的状况等。 而且,使所述倾斜移动机构以使支承所述卷包的卷包支承台倾斜移动的方式构成,将所述相机安装于从该卷包支承台立起的臂。 根据这种结构,由于能够在使卷包支承台倾斜移动的同时使臂移动到较高的位置,因此,与此相伴,能够利用相机从较高的位置确认农场的卷包的位置。 另外,使所述臂构成为设有从卷包支承台立起的固定臂和设于该固定臂的上端侧的转动臂,将所述相机安装于该固定臂。 根据这种结构,能够在固定的较高的位置安装相机并扩宽视野。 另外,将所述相机设于载置在转台上的卷包的高度位置的范围内。 根据这种结构,也可以利用相机确认将膜卷绕于卷包的状态。 或者,也可以使所述臂构成为设有从卷包支承台立起的固定臂和设于该固定臂的上端侧的转动臂,将所述相机安装于该转动臂。 根据这种结构,通过使转动臂转动能够改变相机的影像角度,能够确认以卷包的位置为起始位置的多种影像。 实用新型效果 根据本实用新型,由于具备载置卷包的转台、使该转台倾斜移动的倾斜移动机构及将卷包拾取到通过该倾斜移动机构而进行倾斜移动的转台,并设有朝向拾取卷包的方向的相机,因此,即使驾驶员不直接目视卷包的位置,也能够通过设于驾驶席的前方的显示器确认卷包的位置并拾取卷包。 。 首先,支承卷包6的转台2支承于卷包支承台23,如图3所示,构成为具备:隔开一定间隔且平行地设置的一对辊21;及架设在该辊21间的带22等。而且,如图1所示,通过使辊21以该旋转轴为中心旋转,而使卷包6以水平轴为中心旋转,并且使用设于转台2的下方的马达27(参照图1)使卷包6以铅垂轴为中心旋转。 支承该转台2的卷包支承台23以使用倾斜移动机构20向后方侧倾斜移动的方式构成。该倾斜移动机构20由设于车身后方侧的支点25、与该支点25连结的卷包支承台23及安装于卷包支承台23和主体的框架的液压缸24等构成,如图2所示,通过使该液压缸24伸展,能够抬起卷包支承台23的前方侧。 在该卷包支承台23与拖拉机10的驾驶席之间设有支承卷包6的支承臂3。如图1、图3所示,该支承臂3构成为设有:从卷包支承台23的前方中央部分立起的立起臂31;在该立起臂31的前端侧以能够转动的方式安装的转动臂32;及以T字状设于该转动臂32的前端侧的接触臂33等。而且,使用立起臂31与转动臂32之间的液压缸34,使该转动臂32转动,能够辅助卷包6的拾取、放出等。 另一方面,在主体的框架安装有膜单元4。该膜单元4使膜一边拉伸一边抽出到载置于该转台2的卷包6,如图1所示,设于从主体的框架立起的支柱41的上端侧。在进行该拉伸的情况下,如图4的原理图所示,通过啮合齿轮比不同的齿轮,能够改变各个拉伸辊42、43的转速。此时,能够使设于出口侧(卷包6侧)的第二拉伸辊43比设于膜卷筒45侧的拉伸辊42相对快速地旋转。由此,一边拉伸从膜卷筒45供给的膜一边抽出,能够使膜以与卷包6紧贴的方式卷绕。该拉伸辊42经由弹簧44按压膜卷筒45的外周,由此,能够抑制因膜卷筒45的惯性引起的自由旋转,防止白白地抽出膜。 从该膜单元4抽出的膜卷绕于卷包6,之后,以通过设于转台2的前方的切断保持部5(参照图1等)捆扎膜的状态进行保持、切断。在进行这样的保持、切断的情况下,如图2所示,使转台2倾斜移动,由此,能够利用切断保持部5将膜以从下端捆扎的状态切断。在进行这样的切断的情况下,以保持膜的状态切断卷包6侧的膜,由此,在对下一卷包6卷绕膜时,在保持膜的端部的状态下使转台2旋转。 在这样的构成中,在本实施方式中,将相机7安装于从卷包支承台23立起的支承臂3,使后方的影像显示在驾驶席侧的显示器74。 如图5所示,该相机7经由托架70安装于支承臂3的固定的立起臂31。该托架70使用螺栓72夹持立起臂31,并将相机固定台71调整安装在任意的高度位置。此外,若将该相机7安装于立起臂31的后面、即靠近卷包6的一侧,则卷包6可能会与相机7碰撞。因此,在该实施方式中,安装于支承臂3的侧面。此外,在将相机7安装于这样的立起臂31的侧面的情况下,也可以将相机7安装于卷包6的旋转方向下游侧的侧面。若安装于这样的位置,则具有如下优点:即使在使卷包6旋转的情况下,也能够保护相机7避开通过立起臂31从旋转方向旋转来的卷包6。 另外,对于该相机7的高度位置,设定为不仅能够确认后方的高度位置还能够确认将膜卷绕在载置于转台2上的卷包6的状态的高度位置。具体而言,如图1所示,优选的是,将相机7安装在被设定为水平状态的转台2上的卷包6的高度位置的范围内。 作为这样安装的相机7的视野的方向,如图6(a)所示,设定为显示出转台2的后端部的方向,由此,在将转台2设为水平的状态并使其后退时,能够确认转台2与卷包6的位置关系。 这样设置的相机7的影像以图6(a)及图6(b)所示的状态显示在拖拉机10的驾驶席前方侧的显示器74。在该显示器74显示出影像时,预先显示出作为拾取卷包6时的位置的框线75,以使卷包6进入到该框线75内的方式后退。 接下来,对这样构成的缠绕机1的动作例进行说明。 首先,在要拾取放置于农场的卷包6并卷绕膜的情况下,使拖拉机10后退并使其接近该卷包6的附近,使卷包6位于该转台2的正后方。此时,驾驶员一边观察设于前方侧的显示器74一边使拖拉机10后退,使卷包6进入到在显示器74显示出的框线75(图6(a)的状态)。 而且,在卷绕预定次数的膜后,以成为与图2相同的状态的方式,使转台2倾斜并利用切断保持部5切断膜,将卷包6放出到农场。此时也同样,能够通过相机7将是否放出到农场显示在显示器74,能够确认其放出状态。 这样,根据上述实施方式,具备:载置卷包6的转台2;使该转台2倾斜移动的倾斜移动机构20;及将卷包6拾取到通过该倾斜移动机构20与卷包支承台23一起倾斜移动的转台2,并设有朝向拾取卷包6的方向的相机7,因此,即使驾驶员不直接目视卷包6的方向,也能够利用设于驾驶席的前方的显示器74确认卷包6的位置并拾取卷包6。 另外,由于将所述相机7设于转台2与驾驶席之间的立起臂31,因此,不仅能够确认拾取卷包6时的卷包6的位置,还能够确认将膜卷绕于载置在转台2上的卷包6的状况。另外,由于能够在使卷包支承台23倾斜移动的同时还使支承臂3倾斜移动,因此,在拾取卷包6时,能够通过相机7从较高的位置确认卷包6的位置。 另外,由于将所述相机7设于载置在转台2上的卷包6的高度位置的范围内,因此,不仅能够确认农场的卷包6的位置,还能够确认将膜卷绕于卷包6的状态。 此外,本实用新型不限于上述实施方式,还能够以多种方式实施。 例如,在上述实施方式中,以被拖拉机10牵引的缠绕机1为例列举说明,但也可以应用在自走式的缠绕机等中。在该情况下,在将转台设于驾驶席的前方侧的情况下,也可以将相机安装于前方侧的支承臂。这样,通过使卷包支承台倾斜移动,能够确认从驾驶席观察成为死角的转台的附近的状态。 另外,在上述实施方式中,在支承臂3的立起臂31设有相机7,但不限于此,也可以在转动臂32等安装相机7。若在这样的位置安装相机7,则能够通过调整转动臂32的角度显示出任意的位置的影像。 而且,在上述实施方式中,将相机7安装于支承臂3,但不限于此,也可以将相机7安装于缠绕机1的不同位置或拖拉机10侧。在该情况下,优选的是,相机7设定在能够确认卷包6的位置的较高位置。



封口单元功能完成如下:在胶固于托盘上的转盘外侧胶贴上合适的齿带,组成转盘齿轮,所述转盘齿轮与过盈配合于减速电机二上的齿轮正确啮合;取合适长度的扎丝一端固定于中横杆,一端固定于转盘外圈,当减速电机二旋转时,带动齿轮旋转,从而带动转盘旋转,从而使扎丝饶由缩口单元完成的收缩袋口做圆周运动,完成垃圾袋封口;传感器用于感应打包机是否完成封口,以控制下一步松开袋口动作开始;即减速电机一倒转,直至同步带恢复原样,包装袋可从承重圈上方取出。 如图8,本文所述的报警控制单元由红外传感器、蜂鸣器和单片机组成,其功能完成如下:当红外传感全自动缠绕膜打包机的调速控制单元由减速电机一、减速电机二和所述的单片机组成,其功能完成如下:当人听到警报声时按下开关,驱动电机工作,可以通过单片机对电机进行调速控制。同时在单片机上设置好合适的控制时间,使电机在合适的工作行程中运转。本文所述的转向控制单元由减速电机一和所述的单片机组成,其功能完成如下:在缩口时,由单片机控制电机正转,实现缩口功能;在传感器检测到封口完成后,由单片机控制电机反转,实现放口和同步带回复功能,使已打包好的包装袋能顺利取出以及为下一次打包做好准备工作。本文所述的电池单元由可充放电池、一次性电池或者外接电源中的一种或多种组成,其功能完成如下:为报警控制单元、调速控制单元和转向控制单元提供电能。 一种全自动打包机的整机运行过程,以垃圾打包为例:1、铺设一个普通垃圾袋于打包机中,注意垃圾袋袋口向外弯折,覆盖住承重圈和同步带;2、开始使用垃圾桶,投掷垃圾,垃圾投掷过程中,打包机桶口传感器定时检测垃圾溢满程度;3、传感器检测到垃圾质量或垃圾体积达到“可打包量”(可打包量根据不同垃圾、不同使用环境会有所调整),信号传递,蜂鸣器开始工作,提示可以打包;4、打包人听到蜂鸣,通过开关暂停蜂鸣,同时打包机开始工作;5、开关引发减速电机一运转,带动同步带旋转缩口,单片机控制减速电机一在垃圾袋口旋转紧缩成“可打包”结点时暂停;6、在减速电机一暂停时,减速电机二开始运转,带动转盘转动,从而带动扎丝绕上一步形成的打包结点作三到四周圆周运动,完成封口功能;7、封口完成,单片机控制减速电机二停止运动,同时控制减速电机一开始反向运转,直至同步带回复原状,即垃圾打包机恢复原貌。8、桶身倾斜,打包好的垃圾袋自动滑落。(第八步根据使用者习惯可自选,也可自行拎袋丢弃。) 实施例2
在河北省石家庄市采买缠绕膜打包机混凝土输送泵厂家优质货源到新普机械制造厂,无论您是个人用户还是企业采购,我们都将竭诚为您服务。品质保证,价格优惠,厂家直销,欢迎有需要的客户来电。联系人:魏经理-18330990691,QQ:2606552328,地址:《任泽区邢家湾镇工业区》。